| Version 22 (modified by , 10 years ago) ( diff ) |
|---|
Table of Contents
User guide (git)
This documentation tries to follow the developement version of Py4bot. It may or may not be up-to-date.
For installation instructions, see here.
Usage overview
As Py4bot is a framework, you will find here a description of the main things you need to understand to write your own applications.
Together with this page, have a look at the complete API.
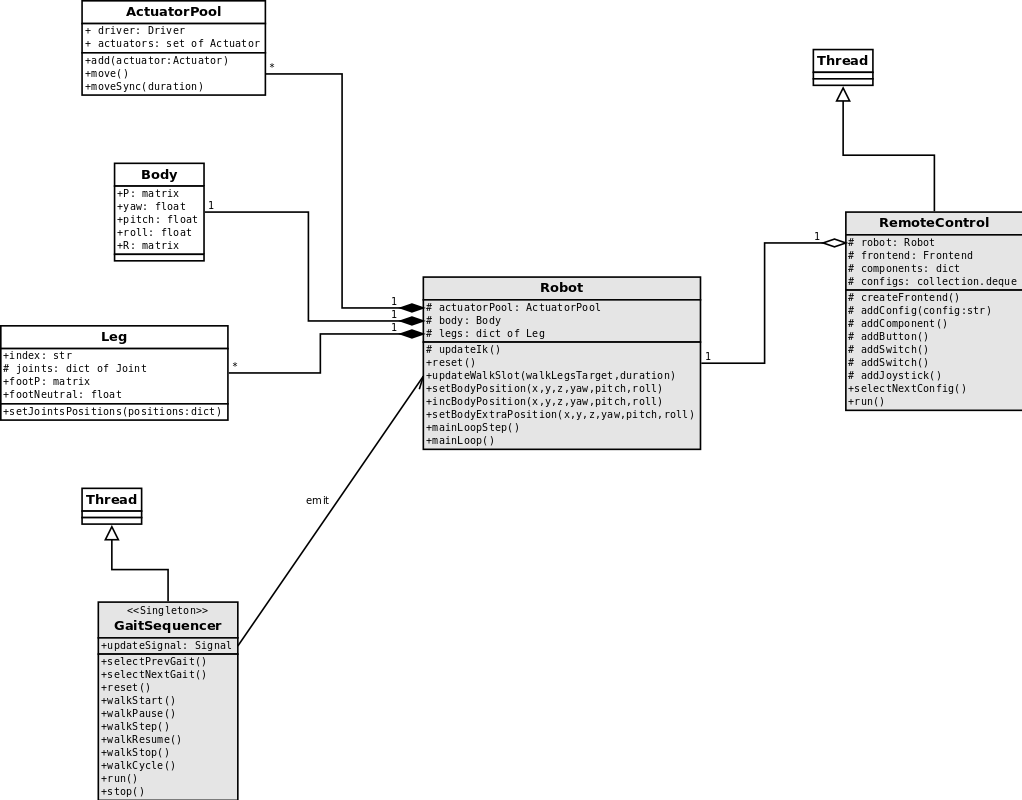
Architecture
The main parts of the framwork are:
- the robot itself;
- the gait sequencer;
- some remote controllers.
Geometry definition
There are several coordinates systems involved when computing maths in order to make a robot walk; it is important to understand how they are defined. All these systems are cartesian.
In the image below, X axis is in cyan, Y axis is in magenta, and Z axis is in yellow:

Robot coordinates system
This coordinates system is attached to the robot itself:
- the origin is at the center of the robot, in the ground plane
- X and Y axes are in the ground plane
- Y axis is the back-to-front axis of the robot
- Z axis points up
Body coordinates system
This coordinates system is attached to the body. It is defined from the body coordinates system:
- the origin is at the center of the body
- X and Y axes define a plane parallel to the body
- Y axis is the back-to-front axis of the body
- Z define the top side of the body
This system is used to define the position of the body in the robot coordinates system, allowing it to move along the 6 DoF (3 translations, 3 rotations).
Legs coordinates systems
This coordinates systems are attached to the legs, so each leg has its own coordinates system. They are defined from the body coordinates system:
- the origin is at the coxa joint
- X and Y axes define a plane parallele to the body
- X axis is along the coxa of the leg
- Z points up
To summurize, from the body coordinate system, the legs coordinates systems are translated by (x, y) and rotated by gamma arround Z.
The origin of a leg is defined as following, from the body coordinates system:

Todo: improve drawing
Gait coordinates system
Or feet coordinates system?
There is the last coordinates system, which is used by the gaits, to make to robot walk. They are defined from the robot coordinates system:
- the origins are at the center of the feet, in the ground plane
- X and Y axes are in the ground plane
- Y axis is the back-to-front axis of the robot
- Z axis points up
To summurize, from the robot coordinate system, the gaits coordinates systems are translated by (x, y).
Misc notes
- the center of the body is above the ground; its height is defined by the legs neutral position (z)
Inverse Kinematic
The Inverse kinematic is the the kinematic equations of a robot to determine the joints parameters that provide a desired position of leg (foot).
Here are the angles involved.
3 DoF legs
- gamma: angle of the leg in the the body X/Y plane (angle between body X axis and leg X axis)
- alpha: angle of the femur in the leg X/Z plane (angle between coxa and femur)
- beta: angle of the tibia in the leg X/Z plan (angle between femur and tibia)

4 DoF leg
- tars: angle of the tars in the leg X/Z plan (angle between tibia and tars)

Robot
Drivers
Servos calibration
You can use the py4bot-gui-servocal.py to fine tune your servos calibration, and generate the SERVOS_CALIBRATION dict.

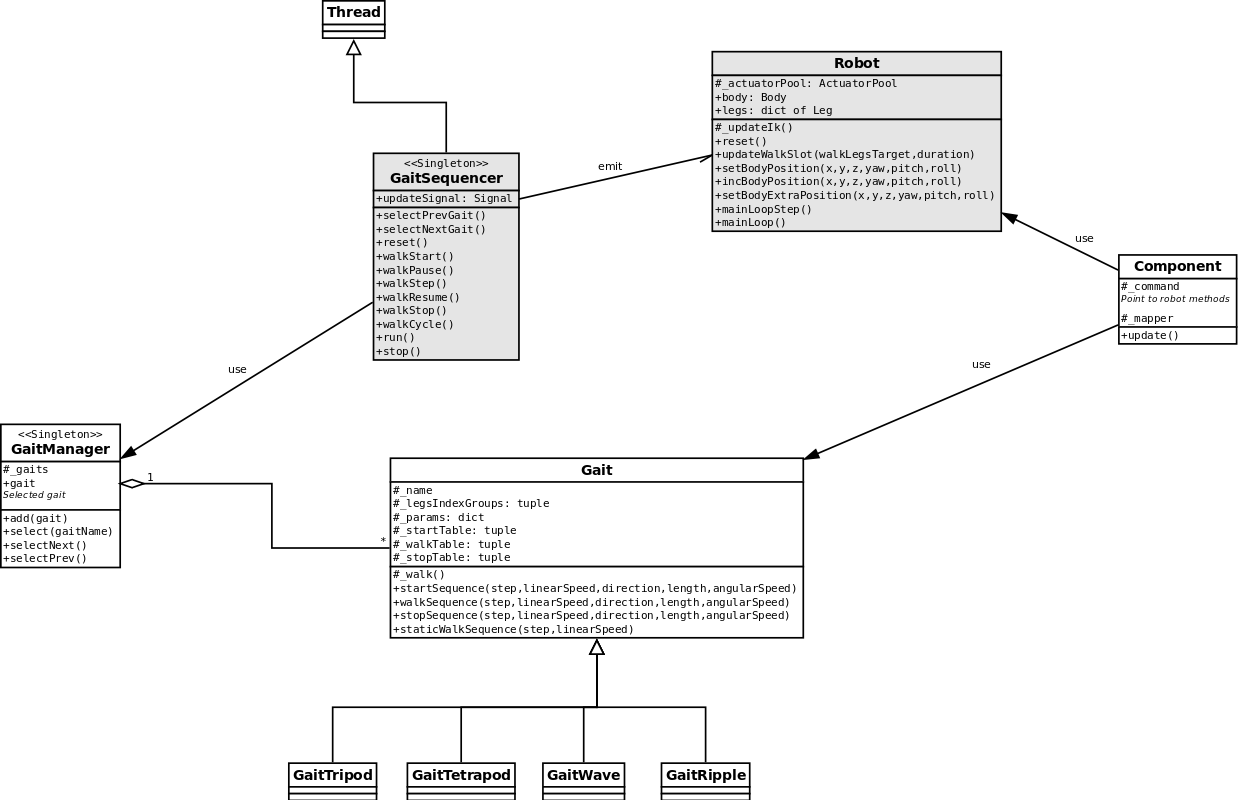
Gaits
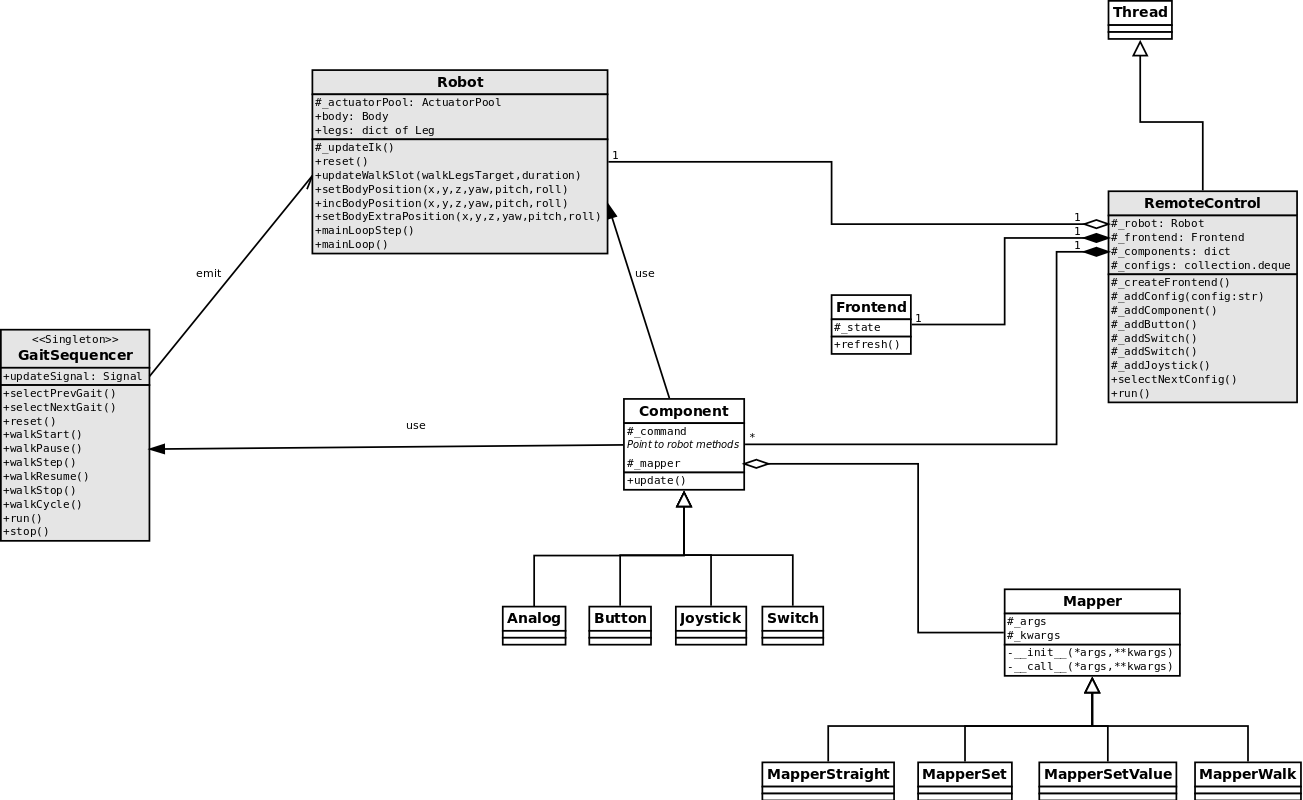
Controllers
Add a new Frontend
Attachments (8)
-
IK3DoF.png
(13.3 KB
) - added by 10 years ago.
IK 3DoF
-
IK4DoF.png
(14.6 KB
) - added by 10 years ago.
IK 3Do4
-
body_legs.png
(17.0 KB
) - added by 10 years ago.
Body/legs geometry
-
coordinates_systems.png
(22.6 KB
) - added by 10 years ago.
Coordinates systems
-
design_simple.png
(76.7 KB
) - added by 10 years ago.
Design - main parts
- design_remote-control.png (89.0 KB ) - added by 10 years ago.
- design_gait.png (87.3 KB ) - added by 10 years ago.
-
py4bot-gui-servocal.png
(233.0 KB
) - added by 9 years ago.
Screenshot of servos calibrator tool
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip