| Version 12 (modified by , 10 years ago) ( diff ) |
|---|
Table of Contents
User guide (git)
This documentation tries to follow the developement version of Py4bot. It may or may not be up-to-date.
For installation instructions, see here.
Usage overview
As Py4bot is a framework, you will find here a description of the main things you need to understand to write your own applications.
Together with this page, have a look at the complete API.
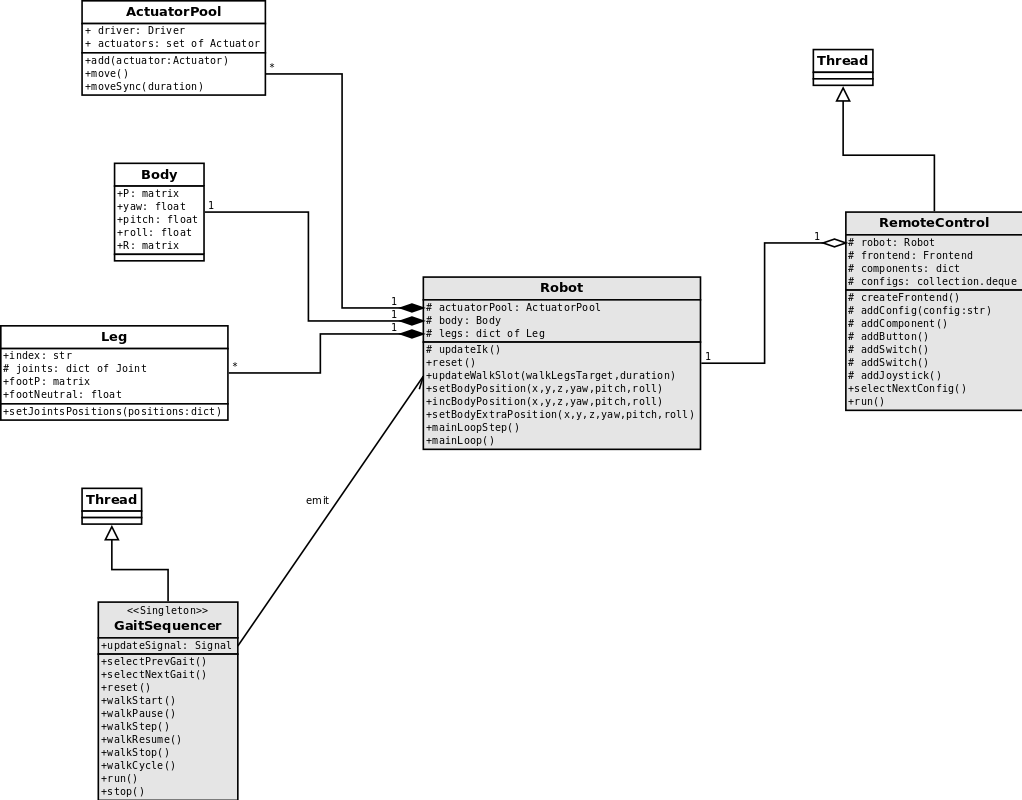
Architecture
The main parts of the framwork are:
- the robot itself;
- the gait sequencer;
- some remote controllers.
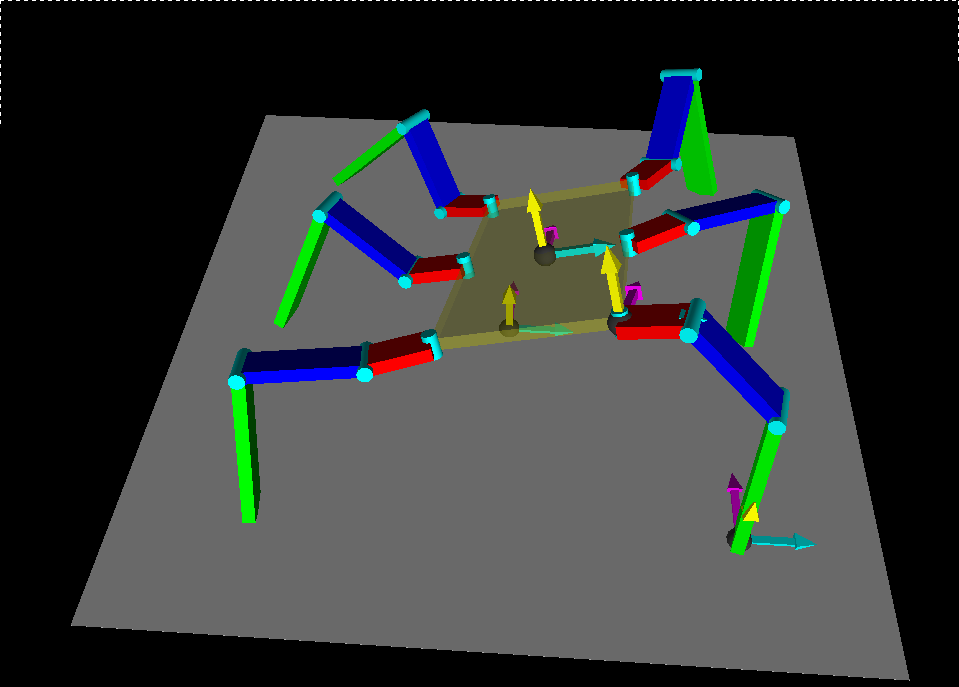
Geometry definition
Inverse Kinematic for 3 DoF legs

Inverse Kinematic for 4 DoF leg

Body/legs geometry

Robot
Drivers
Servos calibration
You can use the py4bot-gui-servocal.py to fine tune your servos calibration, and generate the SERVOS_CALIBRATION dict.

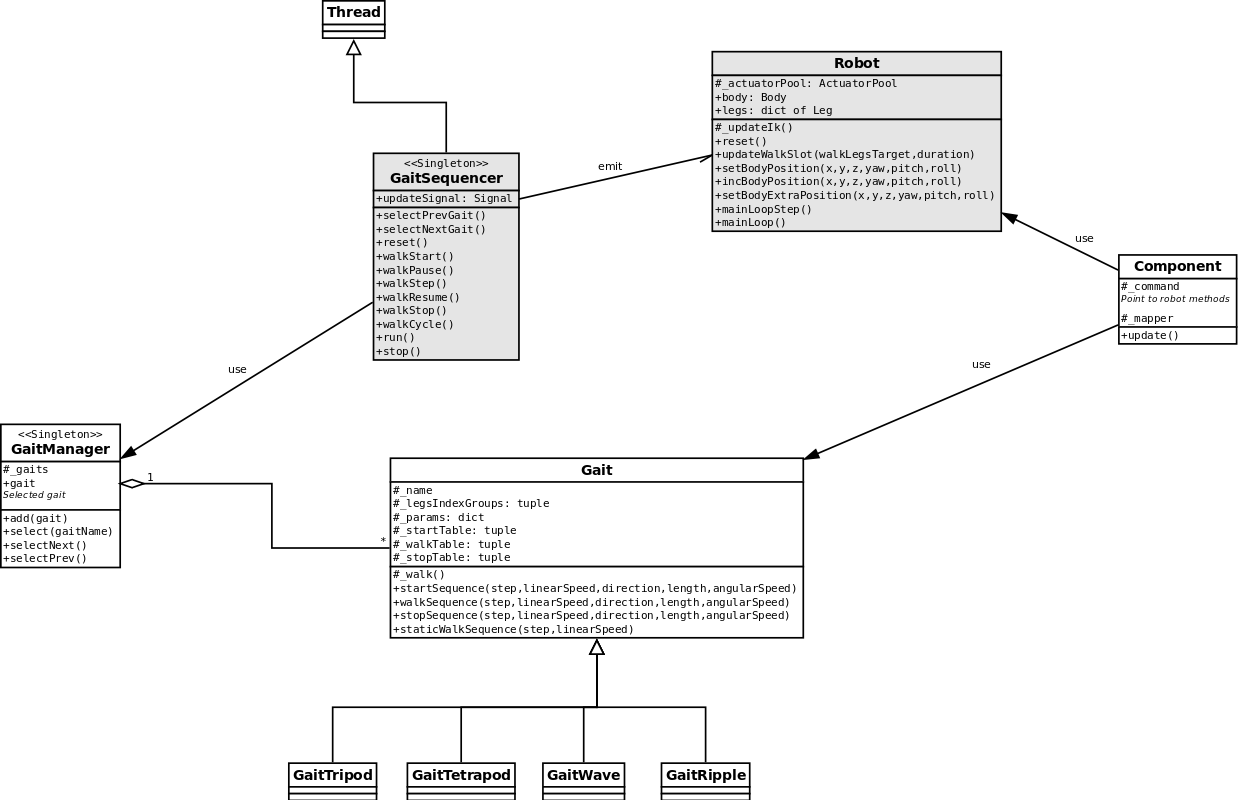
Gaits
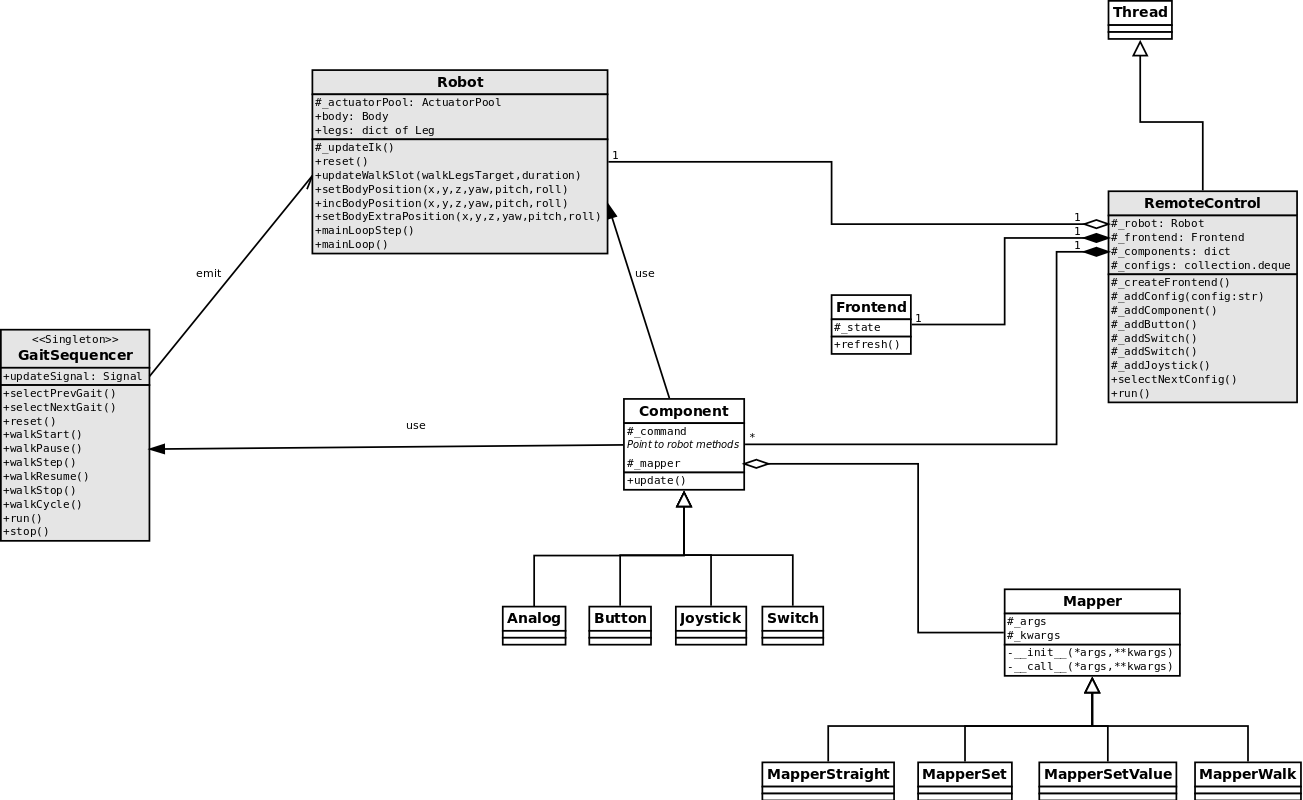
Controllers
Add a new Frontend
Attachments (8)
-
IK3DoF.png
(13.3 KB
) - added by 10 years ago.
IK 3DoF
-
IK4DoF.png
(14.6 KB
) - added by 10 years ago.
IK 3Do4
-
body_legs.png
(17.0 KB
) - added by 10 years ago.
Body/legs geometry
-
coordinates_systems.png
(22.6 KB
) - added by 10 years ago.
Coordinates systems
-
design_simple.png
(76.7 KB
) - added by 10 years ago.
Design - main parts
- design_remote-control.png (89.0 KB ) - added by 10 years ago.
- design_gait.png (87.3 KB ) - added by 10 years ago.
-
py4bot-gui-servocal.png
(233.0 KB
) - added by 9 years ago.
Screenshot of servos calibrator tool
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip
Note:
See TracWiki
for help on using the wiki.