| Version 3 (modified by , 9 years ago) ( diff ) |
|---|
Tutorial 4: Add input frontend support
Files for this tutorial are available in py4bot/examples/tutorial_4/.
Here, we will see how to create a custom input frontend class for a new gamepad. This tutorial assumes you are running a linux OS.
Again, we create a new empty dir in our home dir:
$ mkdir tutorial_4 $ cd tutorial_4
As example, we are going to add support for the gamepad of the Freebox Revolution v6 ADSL box, widely used in France:

(Note that this model has been replaced by another one)
First, we need to know how this gamepad is detected by the kernel. For that, we just launch, from a console, the command:
$ sudo journalctl -f
and plug the gamepad. Here is what the kernel outputs:
[3687970.593351] usb 2-1.7: new low-speed USB device number 15 using ehci-pci [3687970.706423] usb 2-1.7: New USB device found, idVendor=0079, idProduct=0006 [3687970.706426] usb 2-1.7: New USB device strings: Mfr=1, Product=2, SerialNumber=0 [3687970.706428] usb 2-1.7: Product: Generic USB Joystick [3687970.706430] usb 2-1.7: Manufacturer: DragonRise Inc. [3687974.416506] input: DragonRise Inc. Generic USB Joystick as /devices/pci0000:00/0000:00:1d.0/usb2/2-1/2-1.7/2-1.7:1.0/0003:0079:0006.0004/input/input15 [3687974.416759] dragonrise 0003:0079:0006.0004: input,hidraw3: USB HID v1.10 Joystick [DragonRise Inc. Generic USB Joystick ] on usb-0000:00:1d.0-1.7/input0 [3687974.416780] dragonrise 0003:0079:0006.0004: Force Feedback for DragonRise Inc. game controllers by Richard Walmsley <richwalm@gmail.com>
Py4bot comes with py4bot-gui-evcal.py, a graphical tool to retreive an usb input device mapping. To use it, we need to give it the device path in /dev. Let's see what is our gamepad path:
$ ls -1 /dev/input/by-id/ usb-1bcf_USB_Optical_Mouse-event-mouse usb-1bcf_USB_Optical_Mouse-mouse usb-DragonRise_Inc._Generic_USB_Joystick-event-joystick usb-DragonRise_Inc._Generic_USB_Joystick-joystick usb-Microsoft_Microsoft®_Digital_Media_Keyboard_3000-event-kbd usb-Microsoft_Microsoft®_Digital_Media_Keyboard_3000-if01-event-kbd
Here, the path to use is /dev/input/by-id/usb-DragonRise_Inc._Generic_USB_Joystick-event-joystick:
$ py4bot-gui-evcal.py /dev/input/by-id/usb-DragonRise_Inc._Generic_USB_Joystick-event-joystick
{('EV_ABS', 3L): [(('ABS_X', 0L),
AbsInfo(value=127, min=0, max=255, fuzz=0, flat=15, resolution=0)),
(('ABS_Y', 1L),
AbsInfo(value=127, min=0, max=255, fuzz=0, flat=15, resolution=0)),
(('ABS_Z', 2L),
AbsInfo(value=131, min=0, max=255, fuzz=0, flat=15, resolution=0)),
(('ABS_RX', 3L),
AbsInfo(value=127, min=0, max=255, fuzz=0, flat=15, resolution=0)),
(('ABS_RZ', 5L),
AbsInfo(value=127, min=0, max=255, fuzz=0, flat=15, resolution=0)),
(('ABS_HAT0X', 16L),
AbsInfo(value=0, min=-1, max=1, fuzz=0, flat=0, resolution=0)),
(('ABS_HAT0Y', 17L),
AbsInfo(value=0, min=-1, max=1, fuzz=0, flat=0, resolution=0))],
('EV_FF', 21L): [(['FF_EFFECT_MIN', 'FF_RUMBLE'], 80L),
('FF_PERIODIC', 81L),
(['FF_SQUARE', 'FF_WAVEFORM_MIN'], 88L),
('FF_TRIANGLE', 89L),
('FF_SINE', 90L),
(['FF_GAIN', 'FF_MAX_EFFECTS'], 96L)],
('EV_KEY', 1L): [(['BTN_JOYSTICK', 'BTN_TRIGGER'], 288L),
('BTN_THUMB', 289L),
('BTN_THUMB2', 290L),
('BTN_TOP', 291L),
('BTN_TOP2', 292L),
('BTN_PINKIE', 293L),
('BTN_BASE', 294L),
('BTN_BASE2', 295L),
('BTN_BASE3', 296L),
('BTN_BASE4', 297L),
('BTN_BASE5', 298L),
('BTN_BASE6', 299L)],
('EV_MSC', 4L): [('MSC_SCAN', 4L)],
('EV_SYN', 0L): [('SYN_REPORT', 0L),
('SYN_CONFIG', 1L),
('SYN_DROPPED', 3L),
('?', 4L),
('?', 21L)]}
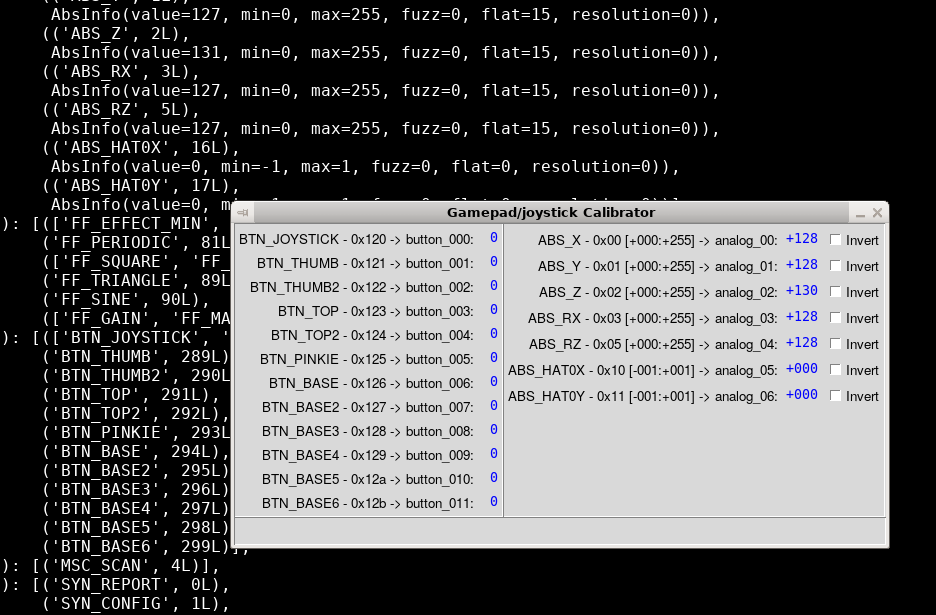
The script automatically retreives the mapping, and creates a nice GUI:

Here, we can play with buttons. For analog axis to work, we need to press the Analog button; the red light should turn on.
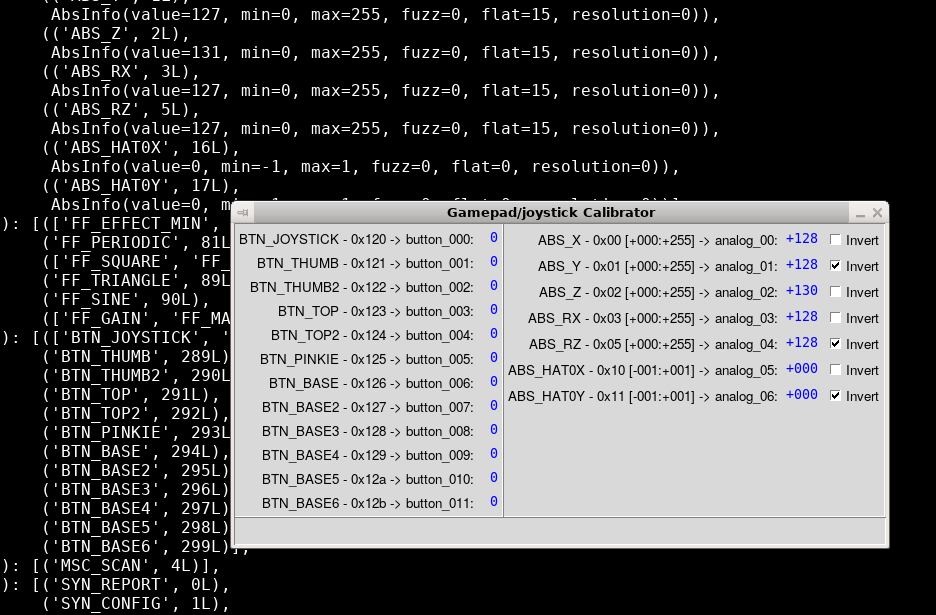
When playing with analog axis, we can see that a few of them are inverted. Py4bot expects than values increase when you push axis front/right. If it is not the case, we need to click the Invert checkbox.
Note that on this specific gamepad, the ABS_Z axis is a combination of ABS_X and ABS_RZ. Don't know what is the purpose... I suggest we don't use it.
Anyway, we should now have the following config:

Then, we just quit the script by closing the window. In the console, we see the final config:
BUTTON_MAPPING = {
0x120: 0, # BTN_JOYSTICK
0x121: 1, # BTN_THUMB
0x122: 2, # BTN_THUMB2
0x123: 3, # BTN_TOP
0x124: 4, # BTN_TOP2
0x125: 5, # BTN_PINKIE
0x126: 6, # BTN_BASE
0x127: 7, # BTN_BASE2
0x128: 8, # BTN_BASE3
0x129: 9, # BTN_BASE4
0x12a: 10, # BTN_BASE5
0x12b: 11, # BTN_BASE6
}
AXIS_MAPPING = {
0x00: 0, # ABS_X
0x01: 1, # ABS_Y
0x02: 2, # ABS_Z
0x03: 3, # ABS_RX
0x05: 4, # ABS_RZ
0x10: 5, # ABS_HAT0X
0x11: 6, # ABS_HAT0Y
}
DEFAULT_CALIBRATION = {
0: ( +0, +255), # ABS_X
1: (+255, +0), # ABS_Y
2: ( +0, +255), # ABS_Z
3: ( +0, +255), # ABS_RX
4: (+255, +0), # ABS_RZ
5: ( -1, +1), # ABS_HAT0X
6: ( +1, -1), # ABS_HAT0Y
}
Let's now create a file named dragonRise.py. At the top of the file, we add a few imports:
from py4bot.services.logger import Logger from py4bot.common.intervalMapper import IntervalMapper from py4bot.inputs.frontends.frontendUsb import FrontendUsb
Then, we copy/paste the output of the script:
# Button mapping BUTTON_MAPPING = { 0x120: 0, # BTN_JOYSTICK 0x121: 1, # BTN_THUMB 0x122: 2, # BTN_THUMB2 0x123: 3, # BTN_TOP 0x124: 4, # BTN_TOP2 0x125: 5, # BTN_PINKIE 0x126: 6, # BTN_BASE 0x127: 7, # BTN_BASE2 0x128: 8, # BTN_BASE3 0x129: 9, # BTN_BASE4 0x12a: 10, # BTN_BASE5 0x12b: 11, # BTN_BASE6 } # Axis mapping AXIS_MAPPING = { 0x00: 0, # ABS_X 0x01: 1, # ABS_Y 0x02: 2, # ABS_Z 0x03: 3, # ABS_RX 0x05: 4, # ABS_RZ 0x10: 5, # ABS_HAT0X 0x11: 6, # ABS_HAT0Y } # Axis calibration DEFAULT_CALIBRATION = { 0: ( +0, +255), # ABS_X 1: (+255, +0), # ABS_Y 2: ( +0, +255), # ABS_Z 3: ( +0, +255), # ABS_RX 4: (+255, +0), # ABS_RZ 5: ( -1, +1), # ABS_HAT0X 6: ( +1, -1), # ABS_HAT0Y }
Finally, we create the class itself:
class DragonRise(FrontendUsb): """ Freebox Revolution v6 gamepad implementation (first model) """ def __init__(self, path, calibration=DEFAULT_AXIS_CALIBRATION): """ Init DragonRise object """ super(DragonRise, self).__init__("DragonRise", path) self._intervalMapper = {} for axis in calibration.keys(): self._intervalMapper[axis] = IntervalMapper(calibration[axis]) def _keyToButton(self, eventCode): code = BUTTON_MAPPING[eventCode] return code def _absToAnalog(self, eventCode, eventValue): axis = AXIS_MAPPING[eventCode] value = self._intervalMapper[axis](eventValue) return axis, value
That's it, our new gamepad support is added. We can then use it as fronted for our Gamepad class, instead of Thrustmaster (see [Tutorial1FirstRobot tutorial 1]).
Note that this class is already in Py4bot.
In the [Tutorial5AdvancedRemoteControlUsage next tutorial], we will go deeper in controllers usage.
Attachments (3)
- gamepad_free.jpg (68.6 KB ) - added by 9 years ago.
- py4bot-gui-evcal_1.png (124.1 KB ) - added by 9 years ago.
- py4bot-gui-evcal_2.png (126.7 KB ) - added by 9 years ago.
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip